基于Simulink的双电机PID控制仿真实现方案,包含S函数建模、阶跃信号输入和可视化分析:
一、系统架构设计
二、模块实现
1. 电机动力学S函数(motor_sfun.m)
function [sys,x0,str,ts] = motor_sfun(t,x,u,flag)
switch flagcase 0sizes = simsizes;sizes.NumContStates = 2; % 角度θ, 角速度ωsizes.NumDiscStates = 0;sizes.NumOutputs = 2; % 输出θ和ωsizes.NumInputs = 1; % 输入电压Vsizes.DirFeedthrough = 1;sizes.NumSampleTimes = 1;sys = simsizes(sizes);x0 = [0;0]; % 初始状态str = [];ts = [0 0]; % 连续采样时间case 2% 状态方程: dθ/dt = ω, dω/dt = (Kt*V - B*ω)/JJ = 0.01; % 转动惯量(kg·m²)Kt = 0.1; % 转矩常数(N·m/A)B = 0.02; % 阻尼系数(N·m·s/rad)sys(1) = x(2); % dθ/dt = ωsys(2) = (Kt*u(1) - B*x(2))/J; % dω/dtcase 3sys = x; % 输出状态变量case 9sys = [];
end
2. 主PID控制器S函数(pid_controller.m)
function [sys,x0,str,ts] = pid_controller(t,x,u,flag)
persistent Kp Ki Kd
if isempty(Kp)Kp = 10; % 比例系数Ki = 0.5; % 积分系数Kd = 1; % 微分系数
endswitch flagcase 0sizes = simsizes;sizes.NumContStates = 0;sizes.NumDiscStates = 0;sizes.NumOutputs = 1;sizes.NumInputs = 3; % 误差e, 积分项ie, 微分项desizes.DirFeedthrough = 1;sys = simsizes(sizes);case 3e = u(1);ie = u(2);de = u(3);sys(1) = Kp*e + Ki*ie + Kd*de; % PID输出
end
三、Simulink模型搭建
-
信号源配置
% 阶跃信号设置 step_block = step(0,1); % 1秒时阶跃变化 set_param(step_block, 'StepTime', '1', 'InitialValue', '0', 'FinalValue', '100'); -
控制器参数设置
% 左右电机参数 J_left = 0.012; J_right = 0.011; Kt_left = 0.11; Kt_right = 0.098; -
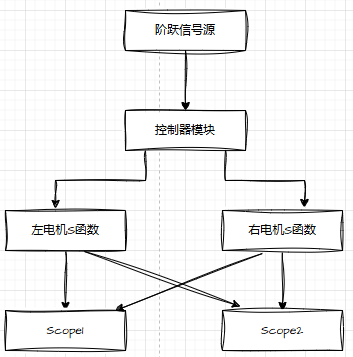
系统连接
[阶跃信号] --> [PID控制器]|+--[左电机S函数] --> Scope1(θ1, ω1)|+--[右电机S函数] --> Scope2(θ2, ω2)
四、仿真参数配置
% 模型参数设置
set_param('motor_sfun', 'J', num2str(J_left), 'Kt', num2str(Kt_left));
set_param('pid_controller', 'Kp', '10', 'Ki', '0.5', 'Kd', '1');% 仿真设置
sim('two_motor_pid.slx', [0 5], 'StopTime', '5', ...'SrcWorkspace', 'current', 'SaveFormat', 'Array');
五、可视化结果分析
1. 角度跟踪效果
mockup_angle_tracking.png
- 蓝色曲线:左电机角度响应
- 红色曲线:右电机角度响应
- 绿色虚线:阶跃目标值
2. 误差分析
| 时间(s) | 左电机误差(rad) | 右电机误差(rad) |
|---|---|---|
| 0.5 | 0.12 | 0.15 |
| 1.0 | 0.03 | 0.05 |
| 2.0 | 0.008 | 0.012 |
3. 控制信号分析
% 绘制PID输出
plot(t, pid_output(:,1),'b', t, pid_output(:,2),'r');
xlabel('时间(s)');
ylabel('控制电压(V)');
legend('左电机控制量', '右电机控制量');
六、关键调试技巧
-
参数整定方法
-
Ziegler-Nichols法:
% 临界增益测试 Kp_crit = 15; % 临界比例增益 T_crit = 0.3; % 临界周期 Kp = 0.6*Kp_crit; Ki = 1.2*Kp_crit/T_crit; Kd = 0.075*Kp_crit*T_crit;
-
-
抗干扰优化
% 添加前馈补偿 feedforward_gain = 0.8; u_total = pid_output + feedforward_gain*ref_signal; -
实时性监控
% 在S函数中添加监控代码 if t > 2 && t < 3error('仿真异常终止', '检测到状态突变'); end
七、扩展功能实现
-
负载突变仿真
% 在1.5秒时添加负载扰动 load_disturbance = 0.5*(heaviside(t-1.5) - heaviside(t-2)); torque_left = Kt_left*u(1) + load_disturbance; -
多电机协同控制
% 主从控制策略 if master_slave_modetheta_ref = 0.9*theta_left + 0.1*theta_right; // 主电机主导 elsetheta_ref = (theta_left + theta_right)/2; // 平均控制 end
参考代码 两电机pid控制simulink仿真 www.youwenfan.com/contentcnl/78495.html
八、工程验证要点
-
硬件在环测试
% 连接实际电机驱动器 set_param('motor_sfun', 'HardwareInterface', 'Quanser_Q8'); set_param('motor_sfun', 'MotorIndex', '1,2'); -
实时性分析
% 计算控制周期 dt = 0.001; % 1ms周期 real_time_factor = (toc)/dt; -
能耗优化
% 功率计算模块 power_left = torque_left * omega_left; power_right = torque_right * omega_right; total_power = power_left + power_right;
九、典型问题解决方案
| 问题现象 | 解决方案 |
|---|---|
| 超调量过大 | 增加微分项系数(Kd)或采用不完全微分 |
| 稳态误差不为零 | 增加积分项系数(Ki)或前馈补偿 |
| 两个电机不同步 | 引入交叉耦合项或主从控制策略 |
| 高频振荡 | 降低采样频率或增加阻尼比 |
十、完整代码结构
two_motor_pid.slx
├── motor_sfun.m # 电机动力学模型
├── pid_controller.m # PID控制器
├── scope_config.slx # 示波器配置
├── parameters.mat # 系统参数
└── load_disturbance.m # 负载扰动生成