
ROS 系列学习教程(总目录)
ROS2 系列学习教程(总目录)
目录
- 一、命名校验
- 二、文件解析与转换流程
- 三、编写接口文件并配置CMake
- 四、执行colcon build
- 五、rosidl_adapter进行IDL解析
- 六、命名转换
- 七、rosidl_parser语法分析
- 八、模版引擎渲染
在ROS2中,接口文件命名和生成的头文件命名有自己的转换机制。
一、命名校验
这一部分ROS1到ROS2有比较大的变化,单独拿出来介绍一下。
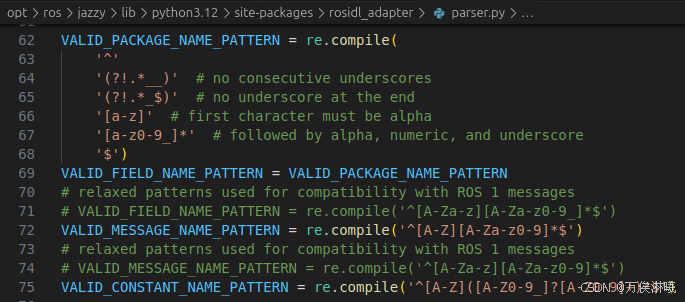
ROS1对命名校验比较宽松甚至没有校验,而且校验比较分散,ROS2中有了比较严格的命名校验,集中放在 rosidl_adapter 包的 parser.py 中,源码路径如下:
/opt/ros/jazzy/lib/python3.12/site-packages/rosidl_adapter/parser.py校验类型与规则:
| 校验类型 | 规则 | 符合规则的常用命名法 | 有效示例 | 无效示例 |
|---|---|---|---|---|
| 功能包名称(VALID_PACKAGE_NAME_PATTERN) 接口变量字段名称(VALID_FIELD_NAME_PATTERN) | 必须以小写字母开头 只能包含小写字母、数字和下划线 不允许连续两个下划线 不允许以下划线结尾 长度至少为1个字符 | (小)蛇形命名法 | user_name test123 variable | userName username_ user__name |
| 接口文件名称(VALID_MESSAGE_NAME_PATTERN) | 必须以大写字母开头 只能包含:大写字母、小写字母、数字 不允许包含下划线 不允许以下划线结尾 不允许连续特殊字符 长度至少为1个字符 | 大驼峰命名法 | UserName Test123 XML | userName user_name UserTest_ |
| 接口常量字段名称(VALID_CONSTANT_NAME_PATTERN) | 必须以大写字母开头 只能包含:大写字母、数字、下划线 不允许以下划线结尾 不允许连续两个下划线 长度至少为1个字符 | 大蛇形命名法 | USER MAX_SIZE API_KEY_123 | MixedCase user 1ST_PLACE |
对于 接口变量字段名称 和 接口文件名称,ROS2比ROS1的校验更严格了。对于从ROS1迁移到ROS2的工程,官方还提供了ROS1兼容的校验选项,如下 VALID_FIELD_NAME_PATTERN 和 VALID_MESSAGE_NAME_PATTERN :
二、文件解析与转换流程
三、编写接口文件并配置CMake
编写接口文件后,我们需要在CMakeLists.txt中的rosidl_generate_interfaces宏配置接口文件。
# 设置接口文件
set(msg_files"msg/RobotStatus.msg""msg/MotorCommand.msg"
)
set(srv_files"srv/CalculatePath.srv""srv/SetLED.srv"
)
set(action_files"action/NavigateToGoal.action"
)
# 生成接口
rosidl_generate_interfaces(${PROJECT_NAME}${msg_files}${srv_files}${action_files}DEPENDENCIESstd_msgsgeometry_msgsaction_msgs
)这是我们使用ROS接口,需要用户操作的为数不多的步骤。
四、执行colcon build
当我们触发编译,CMake宏 rosidl_generate_interfaces 会读取用户定义的 .msg.srv.action 接口文件,并将他们交给 rosidl_adapter 包做下一步处理。
该宏位于:
/opt/ros/jazzy/share/rosidl_cmake/cmake/rosidl_generate_interfaces.cmake五、rosidl_adapter进行IDL解析
IDL即 Interface Definition Language(接口定义语言),ROS2 底层使用 OMG IDL(Object Management Group Interface Definition Language)作为其标准的、与编程语言无关的接口描述格式。
在这一步我们直接编写的 .msg.srv 和 .action 文件会在构建过程中被转换为等价的 .idl 文件,用于后续的语法分析。
这个转换过程由 rosidl_adapter 包处理,命名校验也是在这一步进行的。
生成的 .idl 文件一般存放在 build/<接口功能包名称>/rosidl_adapter 路径下,
RobotStatus.msg的内容如下:
# 机器人状态信息
std_msgs/Header header
string robot_name
uint8 battery_level # 电池电量百分比
bool is_connected # 连接状态
float32 temperature # 温度摄氏度
geometry_msgs/Pose2D current_pose # 使用现有的geometry_msgs生成的RobotStatus.idl如下:
// generated from rosidl_adapter/resource/msg.idl.em
// with input from hello_world_interface/msg/RobotStatus.msg
// generated code does not contain a copyright notice
#include "geometry_msgs/msg/Pose2D.idl"
#include "std_msgs/msg/Header.idl"
module hello_world_interface {module msg {@verbatim (language="comment", text="机器人状态信息")struct RobotStatus {std_msgs::msg::Header header;string robot_name;@verbatim (language="comment", text="电池电量百分比")uint8 battery_level;@verbatim (language="comment", text="连接状态")boolean is_connected;@verbatim (language="comment", text="温度摄氏度")float temperature;@verbatim (language="comment", text="使用现有的geometry_msgs")geometry_msgs::msg::Pose2D current_pose;};};
};六、命名转换
ROS2除了对包名、接口文件名、变量名和常量名加强了校验,还强制定义了接口头文件命名规则为(小)蛇形命名法。在这一步,ROS2会将接口文件名根据该规则生成对应的头文件名。
该转换实现接口 convert_camel_case_to_lower_case_underscore() 位于:
/opt/ros/jazzy/lib/python3.12/site-packages/rosidl_pycommon/__init__.py七、rosidl_parser语法分析
生成与编程语言无关的 idl 文件后,rosidl_parser包将读取 idl 文件,根据给定的语法规则对其进行语法分析,并生成抽象语法树(Abstract Syntax Tree, AST),用于后续不同编程语言生成各自的依赖文件。
给定的语法规则在:
/opt/ros/jazzy/lib/python3.12/site-packages/rosidl_parser/grammar.lark语法分析部分在:
/opt/ros/jazzy/lib/python3.12/site-packages/rosidl_parser/parser.pyAST是一个树形结构,记录了输入文本是如何根据给定的语法规则被解析出来的。它没有保存到文件,只是在内存中的中间产物,要查看它需要修改ROS2源码或自己编写调试代码,示例调试代码如下:
#!/usr/bin/env python3
"""
get_ast.py - 调试 AST 生成的脚本
"""
import sys
from pathlib import Path
from rosidl_parser.definition import IdlLocator
from rosidl_parser.parser import get_ast_from_idl_string
def debug_single_idl(idl_path):
print(f"解析: {idl_path}")
path = Path(idl_path)
locator = IdlLocator(
basepath = path.parent,
relative_path = path.name
)
# 解析 AST
idl_string = locator.get_absolute_path().read_text(encoding='utf-8')
tree = get_ast_from_idl_string(idl_string)
return tree
if __name__ == "__main__":
if len(sys.argv) > 1:
idl_path = sys.argv[1]
ast = debug_single_idl(idl_path)
print()
print(type(ast))
print(ast)
else:
print("用法: python get_ast.py <idl文件路径>")由 RobotStatus.idl 生成的AST为:

可以看到,RobotStatus.msg 内容只有几行,生成的AST已经非常复杂。
由于AST在这里不是重点,不再赘述,感兴趣的同学可以自行查阅。
八、模版引擎渲染
生成抽象语法树后,各语言的接口生成器便根据给定的语法规则生成对应的头文件。
该过程中的语法规则使用使用 Lark 语法定位,保存在如下文件中:
/opt/ros/jazzy/lib/python3.12/site-packages/rosidl_parser/grammar.larkLark 是一个现代化的 Python 解析库,用于处理上下文无关的文法。关于Lark更详细的信息,感兴趣的同学可自行查阅。
该渲染过程的实现位于如下文件中:
/opt/ros/jazzy/lib/python3.12/site-packages/rosidl_parser/parser.py最终头文件生成目录位于:
./build/<package_name>/rosidl_generator_xx头文件安装目录一般位于:
./install/<package_name>/include