注意: 开始以下步骤前,请确保已经切换到专家模式下,否则将无法识别到 U 盘。
1、将 U 盘插入到机器人控制柜上,在示教器上确认是否识别到 U 盘 。

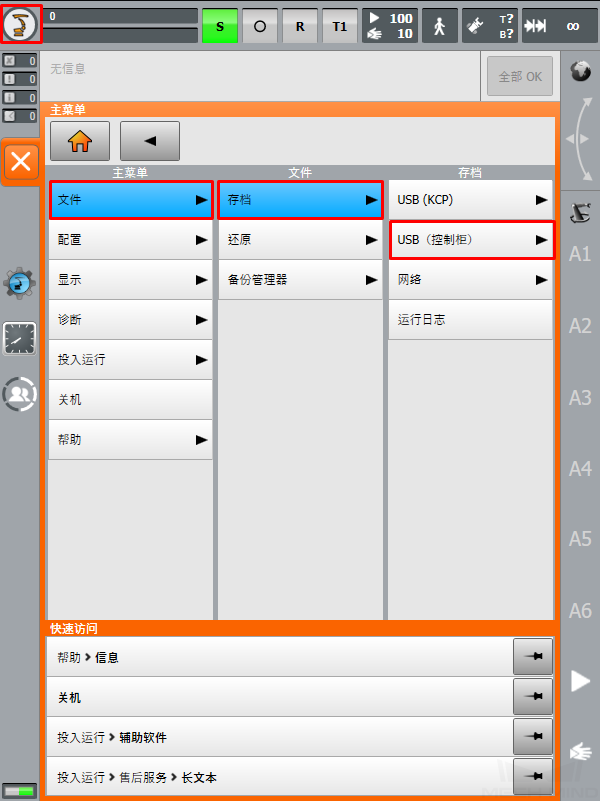
2、按下示教器的主菜单键,在弹出菜单中依次选择
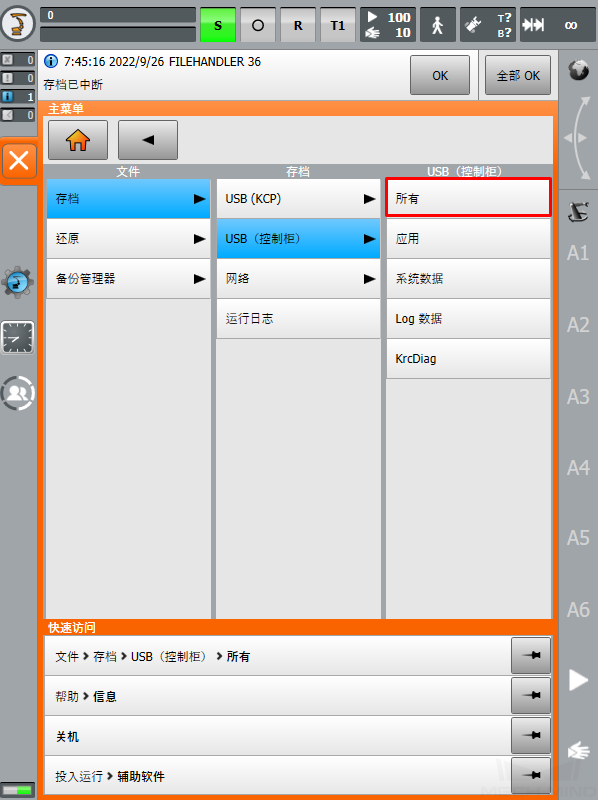

3、当示教器上出现下图所示信息,表示存档完成,同时在 U 盘中得到一个 ZIP 格式文件。最后将 U 盘拔出。

4、用Workvisual 打开备份文件。备份的zip文件先解压,在你的备份文件里搜索wvs格式的文件就是了,一般路径是:xx\机器人程序备份\C\KRC\User\ProjectRoot\20140328 在这下面找到wvs格式的文件就可以打开了。