Generalizable and Efficient Scene Graph Registration【IEEE TRO】
地址:https://arxiv.org/pdf/2504.14440
地址:https://arxiv.org/pdf/2504.14440
主要内容:
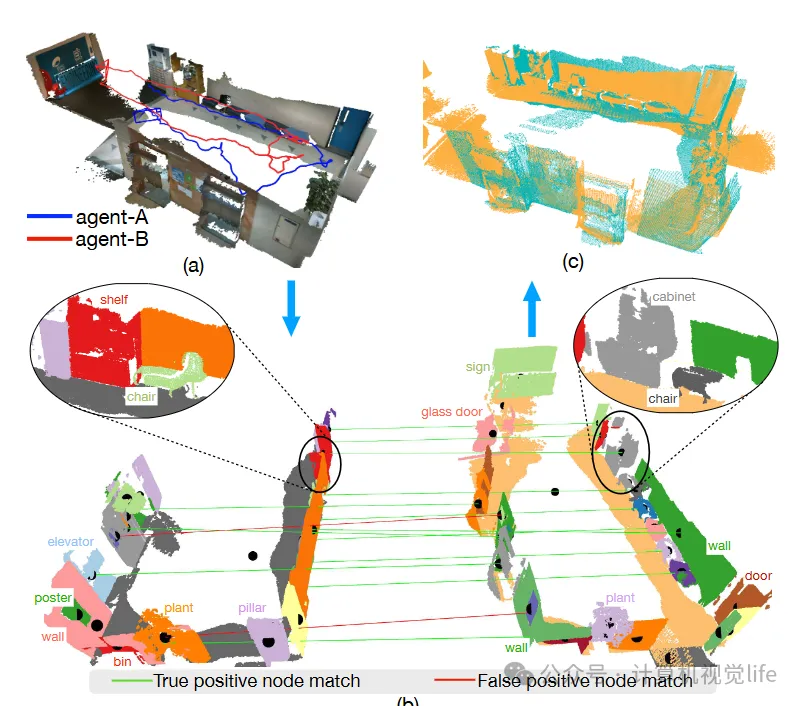
这项研究面向多机器人/先验地图的“对齐”问题,把环境抽象成场景图(节点=物体/语义点,边=关系),并设计网络同时编码三类信息:开放集语义、带空间感知的局部拓扑和形状特征,融合成紧凑的节点描述;前端用由粗到细的匹配找对应,后端用鲁棒位姿估计解出两图的变换,全流程保持稀疏分层表示以减少 GPU 占用与通信带宽;训练数据不依赖人工标注,而由视觉基础模型 + 语义建图自动生成;在两智能体 SLAM 基准上,配准成功率显著优于手工特征方案,相比视觉回环网络召回更高且每帧仅约 52 KB通信,代码开源,为低带宽场景下的多机器人地图对齐与共享定位提供了通用基石。