bot选
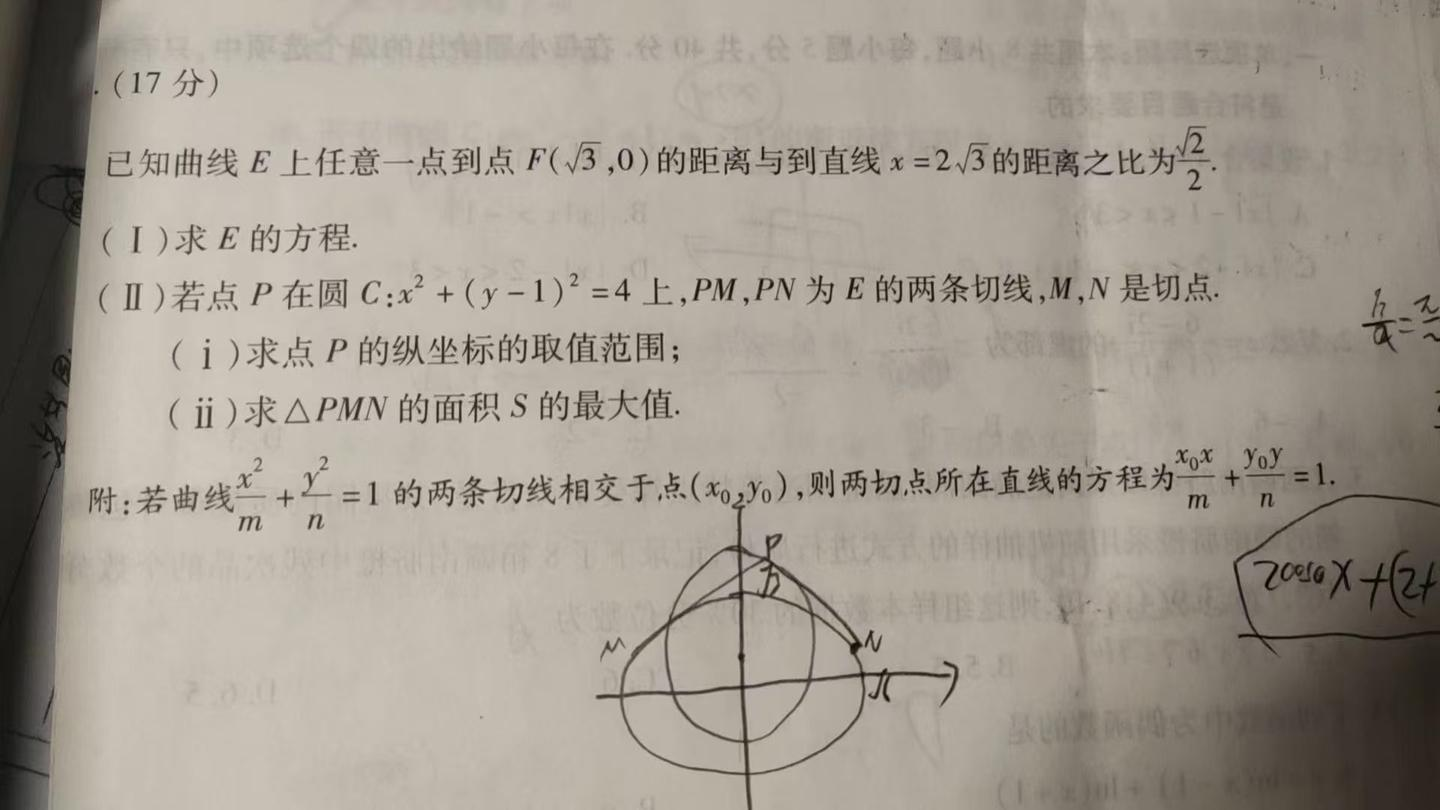
前两问容易解决,得 \(E:\dfrac{x^2}{6}+\dfrac{y^2}{3}=1\),\(y_p\in(1,3]\)
bot指出:第三问是可以直接联立爆算的!
设 \(P(x_0,y_0)\),则 \(MN:x_0x+2y_0y-6=0\),\(P\) 到 \(MN\) 的距离为:
\[\dfrac{x_0^2+2y_0^2-6}{\sqrt{x_0^2+4y_0^2}}
\]
然后将 \(MN\) 和 \(E\) 联立,得到:
\[(\dfrac{x_0^2+2y_0^2}{2y_0^2})x^2-\dfrac{6x_0}{y_0^2}x+(\dfrac{18}{y_0^2}-6)=0\\
|x_M-x_N|=\dfrac{4y_0\sqrt{3}\sqrt{x_0^2+2y_0^2-6}\sqrt{x_0^2+4y_0^2}}{x_0^2+2y_0^2}\\
|MN|=|x_M-x_N|\times\sqrt{1+k_{MN}^2}=|x_M-x_N|\times \dfrac{\sqrt{x_0^2+4y_0^2}}{2y_0}\\
=\dfrac{2\sqrt{3}\sqrt{x_0^2+2y_0^2-6}\sqrt{x_0^2+4y_0^2}}{x_0^2+2y_0^2}
\]
因此:
\[S=\dfrac{1}{2}|MN|\times d\\
=\dfrac{\sqrt{3}\sqrt{x_0^2+2y_0^2-6}^{3/2}}{x_0^2+2y_0^2}
\]
令 \(t=x_0^2+2y_0^2-6\),有 \(S=\sqrt{3}\dfrac{t^{3/2}}{t+6}\)
令 \(f(t)=\dfrac{t^{3/2}}{t+6}\),则 \(f'(t)=\dfrac{\dfrac{3}{2}\sqrt{t}(t+6)-t\sqrt{t}}{(t+6)^2}\)
由 \(t=x_0^2+2y_0^2-6,x_0^2+(y_0-1)^2=4\Rightarrow t=y_0^2+2y_0-3\in(0,12]\)
因此 \(f'(t)>0\),\(f(t)\) 递增,故 \(S\) 最大值在 \(t=12\) 时取到,为 \(4\)