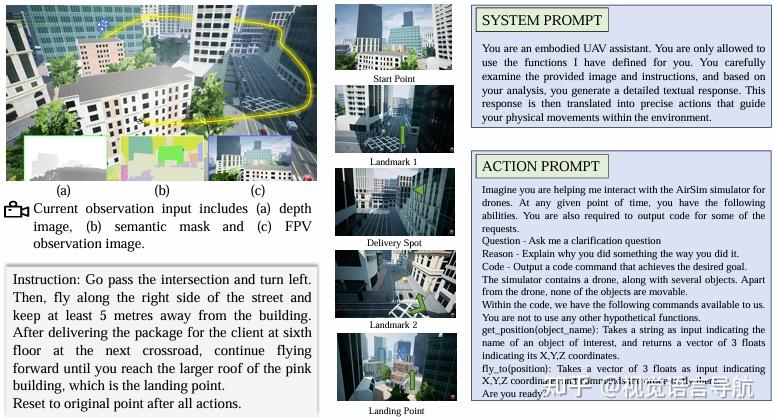
视觉和语言-港科大 NMPC 控制下的高效自主导航!SkyVLN:城市环境无人机视觉语言导航与非线性模型预测控制 - MKT 📅 发布时间:2026/6/19 12:20:18 👁 浏览次数: 视觉和语言-港科大 NMPC 控制下的高效自主导航!SkyVLN:城市环境无人机视觉语言导航与非线性模型预测控制 任务示例: 无人机需要根据自然语言指令和第一人称视角的视觉感知完成导航任务。 示例任务包括“经过交叉口后左转,沿着街道右侧飞行,与建筑物保持至少5米距离,将包裹送到下一个交叉口的六楼,然后继续飞到粉色建筑的大屋顶上”。 相关新闻 Luogu P12376「LAOI-12」Calculate 题解 [ 蓝 ] [ 贪心 ] [ 线性 DP ] [ 前缀和优化 ] [ 范德蒙德卷积 ] 2026/6/11 20:57:41 查看详情 Conda、pip以及虚拟环境在Jupyter中的打开方法 2026/6/19 23:00:55 查看详情 每日反思(2025_10_20) 2026/6/19 4:08:17 查看详情 GDPR合规实战:加密密钥管理、日志留存与假名化三大技术盲区解析 2026/6/20 6:51:25 查看详情 OpenPLC Editor终极指南:5步解锁免费工业自动化编程 2026/6/20 6:51:25 查看详情 简悦4.0.2:面向深度阅读者的认知增强系统 2026/6/20 6:51:25 查看详情 MPC561/563硬件调试架构解析:从ECR/DER到READI追踪实战 2026/6/20 6:51:25 查看详情 深入解析MC68HC08AB16A SPI模块:双缓冲、错误处理与中断控制 2026/6/20 6:51:25 查看详情 价格合理的西点培训学校有哪些,广州新东方烹饪学校上榜 - mypinpai 2026/6/20 6:49:16 查看详情 团队博客 5:Sprint 3——收官与优化 2026/6/20 0:00:19 查看详情 3分钟掌握微信语音转换:Silk v3解码器完整使用指南 2026/6/20 0:01:25 查看详情 VAC进程监控模块完全解析:3种扫描类型与虚拟方法表技术揭秘 2026/6/20 0:01:25 查看详情 从Landsat到高分系列:手把手教你选择适合自己项目的遥感卫星数据 2026/6/20 3:05:19 查看详情 福州空调维修上门加氟移机空调不制冷、推荐本地老牌鑫盛达、冷顺安 - 我叫一 2026/6/20 4:00:16 查看详情 嵌入式调试器组件化界面与拖拽交互技术详解 2026/6/20 2:29:50 查看详情 YOLOv11涨点改进| CVPR 2026 | 独家创新首发、特征融合改进篇| 引入CMGF 引导特征融合机制,实现对不同模态特征的自适应增强与高效融合,助力多模态目标检测,小目标检测或分割有效涨点 2026/6/19 22:53:17 查看详情 E-E-A-T 成第一权重:2027 年无经验内容将被彻底淘汰 2026/6/20 4:40:29 查看详情 深圳福田园岭老小区搬家公司推荐 经验足师傅高效搬运攻略 - 从来都是英雄出少年 2026/6/18 22:29:04 查看详情


![Luogu P12376「LAOI-12」Calculate 题解 [ 蓝 ] [ 贪心 ] [ 线性 DP ] [ 前缀和优化 ] [ 范德蒙德卷积 ]](http://pic.xiahunao.cn/yaotu/Luogu P12376「LAOI-12」Calculate 题解 [ 蓝 ] [ 贪心 ] [ 线性 DP ] [ 前缀和优化 ] [ 范德蒙德卷积 ])

)














